本文共 6736 字,大约阅读时间需要 22 分钟。
文章目录

前言
前一篇完成了开发板的入门级程序,点亮一个LED灯。今天我们就利用LED+定时器设计一个交通灯,算是实验加小练习了。
大家可以回去看看LED的点亮程序。 这个很重要,因为有一些基础配置在这一章,我们这一章着重讲一下定时器。一、定时器是什么?
定时器是对周期固定的脉冲信号进行计数。这里我就用很通俗的话来说一下。这里以F407为例,407的主频是168M。这里的168M是什么概念呢,就是最大可以以168M的频率记一次数。再通俗一点,就是最最短可1/168M(秒)记一次数。也就是说最短可以0.00000000595s,记一次,那我要记1s,要数多少次,要数168000000次,太多了,所以我们要分频,和规定计数值(就是要数多少次的意思),这样我们就好算了。比如说168M除以168,就是168分频,分频就是÷的意思。那就变成1MHz数一次数,记一秒我只需要数1000000次就行了,当然还有很多很多其他组合,所以我们的定时时间才可以任意设定,
所以定时器主要关心分频系数和计数值,是没有问题的,这两个是决定定时时间的。
1、使用定时器关注的问题


2、 STM32定时器家族

3、定时器的主要功能
定时器真的是很常用的一个模块,无论是输出PWM,还是输入捕获,还是ADC采样,都用到了定时器,
简直不要太强。

二、定时器的总线结构
STM32F4定时器有(14个),基本定时器(2个):TIME6,TIME7,通用定时器(10个):TIME2~5,TIME9 到14,高级定时器(2个):TIME1 , TIME8,为什么要分这么多个,因为应用场景不一样,所以需要用到哪些功能我们可以开哪个。


1、三种定时器功能比较

2、计数器时钟频率计算
这里要注意一下,我们定时器时钟是挂在APB1或者APB2总线上的,通过看上面定时器的总线结构,我们可以看到,通用定时器(10个):TIME2~5,TIME9 到14是挂在APBA2总线上的,也就是说这些定时器最高频率可以达到168MHz,其余的定时器,最大只能达到84M

三、HAL库函数的设计方法
1、计数器时钟频率计算举例
定时器的还有一些相关的寄存器咱就不说了,我们主要关心怎么用,

2、定时器基本配置结构体

3、定时器相关库函数




四、定时翻转LED灯状态(定时中断方式)

1、设计步骤




2、工程配置
1、系统设置
设置SYS debug为串行总线,设置高速外部时钟HSE选择外部时钟源


2、GPIO口设置
这里我以PF8为例,LED0,输出



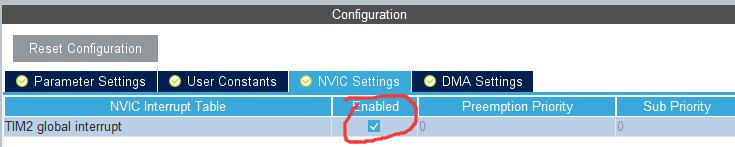
3、定时器2设置
选择内部时钟,设置好分频系数,1s的定时,开区自动重装载,意思是记完了又重新开始记,循环往复,开启定时器中断。

4、时钟设置

5、项目文件设置
这里为何这样配置前面一章也有介绍,这里不在重复。


6、创建工程文件
点击GENERATE CONDE 创建工程

3、例程
在while(1)上方用户代码区初始化使能定时器2
 在main.c上方用户代码区初始化添加回调函数,在这个回调函数里面就是我们要做的事情。我们要1S翻转一次,所以我们那就添加翻转的函数。通俗点就是说我每隔一秒必须要回到这个函数,把这个函数里面要做的事情做完我才去做其他事情。
在main.c上方用户代码区初始化添加回调函数,在这个回调函数里面就是我们要做的事情。我们要1S翻转一次,所以我们那就添加翻转的函数。通俗点就是说我每隔一秒必须要回到这个函数,把这个函数里面要做的事情做完我才去做其他事情。 
 点击我们的魔术棒,进入到debug的setting,一定要勾选Reset and Run,否则是没有现象的。
点击我们的魔术棒,进入到debug的setting,一定要勾选Reset and Run,否则是没有现象的。  编译没问题,我们就点击下载到开发板看实验现象。
编译没问题,我们就点击下载到开发板看实验现象。 
这是main.c文件,大家可以直接复制,主要是底层的时钟,GPIO,定时器配置好了,事情就简单了。
/* USER CODE BEGIN Header *//** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * ** * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** *//* USER CODE END Header *//* Includes ------------------------------------------------------------------*/#include "main.h"#include "tim.h"#include "gpio.h"/* Private includes ----------------------------------------------------------*//* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*//* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*//* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*//* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/void SystemClock_Config(void);/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*//* USER CODE BEGIN 0 *///定时器2中断服务函数 @main.cvoid HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){ if (htim->Instance == TIM2) { HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_8); }}/* USER CODE END 0 *//** * @brief The application entry point. * @retval int */int main(void){ /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_TIM2_Init(); /* USER CODE BEGIN 2 *///使能定时器2 HAL_TIM_Base_Start_IT(&htim2); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */}/** * @brief System Clock Configuration * @retval None */void SystemClock_Config(void){ RCC_OscInitTypeDef RCC_OscInitStruct = { 0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = { 0}; /** Configure the main internal regulator output voltage */ __HAL_RCC_PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); /** Initializes the CPU, AHB and APB busses clocks */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 8; RCC_OscInitStruct.PLL.PLLN = 336; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 4; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB busses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) { Error_Handler(); }}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//** * @brief This function is executed in case of error occurrence. * @retval None */void Error_Handler(void){ /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ /* USER CODE END Error_Handler_Debug */}#ifdef USE_FULL_ASSERT/** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */void assert_failed(uint8_t *file, uint32_t line){ /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */}#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
© Copyright (c) 2021 STMicroelectronics. * All rights reserved.
4、实现结果
定时器的定时还是很精确的,我们就是利用定时器的精确定时。这里是1S定时。

总结
定时器可以说是STM32的精髓,大家一定要好好把握,第一次学定时器的时候,我甚至连定时器中断是什么,那是因为当时的知识储备不足,到后来,第二次,第三次学的时候才后知后觉,所以我们是需要一个认知的过程的。代码之路任重道远~,还需多多练习。

转载地址:http://kbezi.baihongyu.com/